With the development of technology, the application of industrial robot is more and more popular. Industrial robot is a multi-purpose manipulator that can realize automatic control, reprogrammable, multi-degree of freedom, and freedom of motion to create a space-right angle relationship. The way its working mainly by completing linear motion along the X, Y, and Z axes. Because of its wide variety, motion axes and coordinate systems, it is easy to make mistakes, especially for novices.
Robot motion axis
The so-called axis of an industrial robot is about available degree of freedom. If the robot has three degrees of freedom, it can move freely along the x, y, and z axes, but it cannot tilt or rotate. When the number of axes of the robot increases, it is more flexible for the robot.
In the production of industrial robots, it is generally necessary to equip peripheral equipment in addition to its own performance characteristics, such as a rotary table for rotating a workpiece, a mobile station for moving a workpiece etc. The motion and position control of these peripherals need to be matched with industrial robots and require corresponding accuracy. Generally, the robot motion axis can be divided into a robot axis, a base axis and a tooling axis according to its functions, the base axis and tooling axis are collectively referred to as an external axis.
Most popular in actual production is 6 axis industrial robot, which has 6 movable joints (axes), and the definitions of movement axes are also different from different industrial robots. The axis used to ensure reaches to any position on workspace is called basic axis or main axis; the axis used to implement the arbitrary position of the end effector is called wrist axis or minor axis.
Here’s a table list of our P1500 6 axis painting robot technical properties
| Name | P1500 6 Axis Painting Robot | MOI | R axis – 8.0N.m(0.82kgs.m) |
| Payload | 6KG | B axis -8.0N.m(0.82kgs.m) | |
| Accuracy | +-0.15mm | T axis -3.0N.m(0.3kgs.m) | |
| Active zone | S axis -(rotate)- ±170°
(±60°on ceiling/wall) |
R axis -0.2kg.m2 | |
| L axis – 65°~+120° | B axis -0.2kg.m2 | ||
| U axis -165°~+205° | T axis -0.07kg.m2 | ||
| R axis – ±190° | Weight | 150kg | |
| B axis – ±145° | Environment | Temperature 0±40° | |
| T axis – ±360° | Humidity 20-80%RH | ||
| Speed | S axis – 3.23rad/s, 185°/s | Vibration 4.9m/s2 | |
| L axis – 3.23rad/s, 185°/s | |||
| U axis – 3.23rad/s, 185°/s | Capacitor | 1.5kVA | |
| R axis – 6.28rad/s, 360°/s | Installation | Ground, wall & ceiling | |
| B axis – 7.16ad/s, 410°/s | Explosion proof | Explosion proof servo & physical arm structure | |
| Taxis – 8.73rad/s, 500°/s | Grade | TIIS, ATEX |
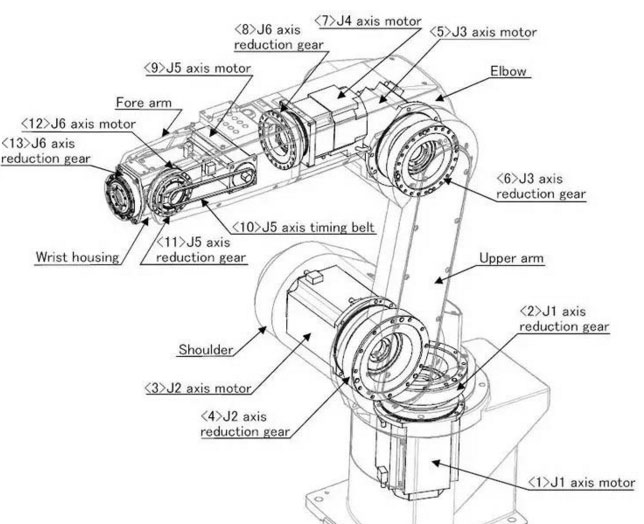
6 axis motion robot
The six-axis motion robot mechanical structure is this, six servo motors directly drive the rotation of six joint shafts through a reducer and a synchronous pulley. Six-axis industrial robots generally have six degrees of freedom. Common six-axis industrial robots include rotation (S-axis), lower arm (L-axis), upper arm (U-axis), wrist rotation (R-axis), and wrist swing (B-axis). And wrist rotation (T-axis). Six motions are combined to achieve a 6-degree-of-freedom action.
The movement of 6 axis robot
As the most widely used industrial robot, six-axis industrial robot has many advantages such as high flexibility, heavy load and high positioning accuracy etc. The respective movement paths of the six axes as following